智慧树知到《机械设计基础(黑龙江联盟)》章节测试答案
智慧树知到《机械设计基础(黑龙江联盟)》章节测试答案
绪论单元测试
1、机器中独立运动的单元体,称为零件。
A.正确
B.错误
正确答案:错误
2、机构中的构件是由一个或多个零件所组成,这些零件间也能产生相对运动。
A.正确
B.错误
正确答案:错误
3、机械是()和()的总称。
A.机器
B.机构
C.构件
D.零件
正确答案:机器;机构
第一章单元测试
1、运动副是多个构件直接接触且具有确定相对运动的联接。()
A.正确
B.错误
正确答案:错误
2、组成低副的两个构件间是点或线接触。()
A.正确
B.错误
正确答案:错误
3、若将运动链中的一个构件相对固定,运动链则成为机构。()
A.正确
B.错误
正确答案:正确
4、一个构件可以由多个零件组成。()
A.正确
B.错误
正确答案:正确
5、若干构件通过运动副联接而成的可动系统称为运动链。()
A.正确
B.错误
正确答案:正确
6、零件是机构中的运动单元。()
A.正确
B.错误
正确答案:错误
7、在机构自由度计算公式F=3n-2PL-PH中,PL表示机构中低副的数目。()
A.正确
B.错误
正确答案:正确
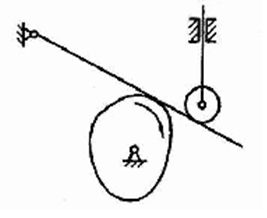
8、图示机构中存在复合铰链。()
。
A.正确
B.错误
正确答案:正确
9、运动副是()个构件直接接触且具有确定相对运动的联接。
A.1
B.2
C.3
D.4
正确答案:2
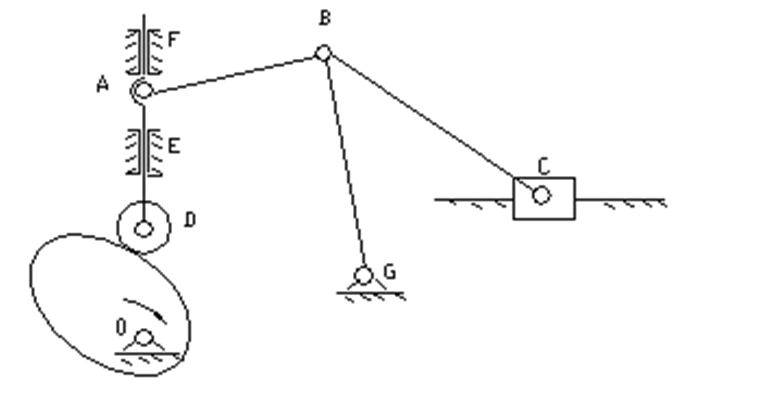
10、图示机构包含()个构件。
A.3
B.4
C.5
D.6
正确答案:4
11、图示机构包含()个运动副。
A.3
B.4
C.5
D.6
正确答案:4
12、图示机构有()个移动副。
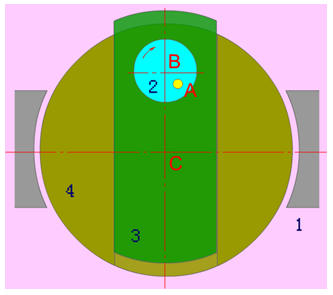
A.1
B.2
C.3
D.4
正确答案:1
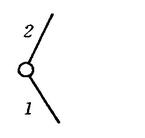
13、机构运动简图中移动副的表示方法为()。
A.
14、平面低副所受的约束数为()。
A.1
B.2
C.3
D.4
正确答案:2
15、图示机构的自由度为()。
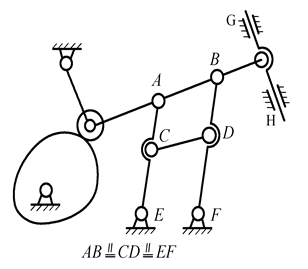
A.1
B.2
C.3
D.4
正确答案:1
16、图示机构的自由度为()。
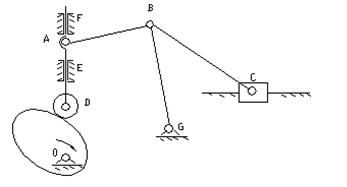
A.1
B.2
C.3
D.4
正确答案:1
17、图示机构的自由度为()。